
Fluent and logical arguments the controller design
This assignment draws most directly on knowledge of linearisation, second-order systems and second-order control systems.
The approach you should take is that your tutor is your boss at your first job after graduation, and they have asked you to prepare design proposal. Therefore the report should be of a professional standard.
Here ρ is density of air in kg/m3, CD is a dimensionless drag coefficient, and A is cross-sectional area of the vehicle in m2(looking from the front). Reasonable values for cD for a car are about 0.25 to 0.45 (Wikipedia has an interesting list). For your car, look up, measure, or estimate A and cD.
1. Design a controller that will precisely achieve any desired speed even if there are constant dis- turbances so that the true system is
4. Examine the effect of uncertainty in mass (e.g. due to the number of passengers).
To begin the work of this part, you should (1) be familiar with Sec 4.1 of textbook and the lecture material (Lecture 2) on linearisation (2) know how to build Simulink blocks for dynamical systems. You may want to investigate the “Signal Generator” or “Repeating Sequence Stair” blocks in Simulink for some of the reference inputs.
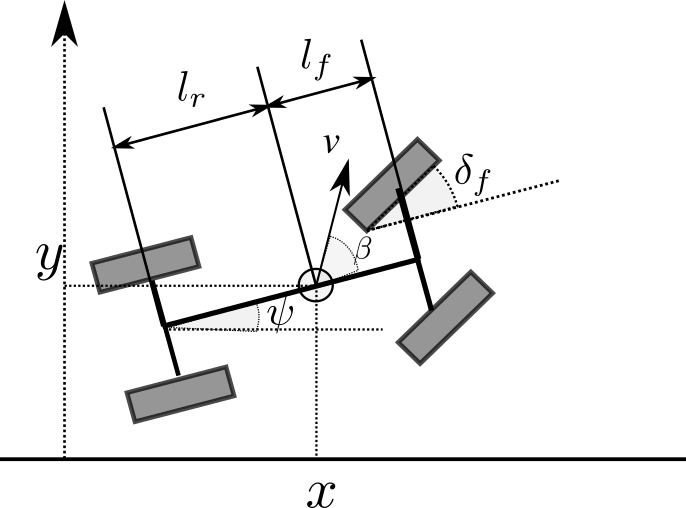
The motion of the centre of mass (CoM) position (x, y) is described by the following differential equations (you might like to verify this, but it is not part of the assignment). Note the coupling to longitudinal dynamics through v(t).
In addition, we have the following algebraic equation between δf and the CoM rotation angle β:
| tan(β) = | lr |
|
|---|---|---|
| lf + lr |
• a second-order differential equation describing how y(t) depends on δf(t); and thus• a transfer function from steering-wheel angle δf to lateral position y that has the form G(s) =As + B
s2
2
4. Discuss the effect and physical meaning of the system zero (zero of transfer function) when the vehicle is reversing (meaning: v0 < 0).
3 Report Format
3. Longitudinal Controller
4. Lateral Controller
The report must be entirely your own work, except where clearly indicated otherwise. Any references to external material (papers, books, or websites) must follow the guidelines introduced in lecture 1.
3.2 Marking Schedule
• Model and linearisation of cruise control (8%)
• Model, linearisation, and transfer function of lane changing (12%)• Simulink block for numerical simulations (5%)
Longitudinal Controller: (25%)
Conclusions (5%)
• Summary of the project and results
• Highlight the most significant discoveries/understandings• Discussion on possible improvements and future directions